1.6.14 Motion Planning

INPUT OUTPUT
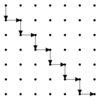
Input Description:
A polygonal-shaped robot s in a given starting position
in a room containing polygonal obstacles, with a desired
ending position t.
Problem:
Find the shortest path in the room taking s to t without
going through any of the obstacles.
Excerpt from
The Algorithm Design Manual:
The difficulty of motion planning will be obvious
to anyone who has ever had to move a large piece of furniture
into a small apartment.
The problem of motion planning
also arises in systems for molecular docking.
Many drugs are small molecules that act by binding to a given target
model.
The problem of identifying which binding sites are accessible
to a candidate drug
is clearly an instance of motion planning.
Plotting paths for mobile robots is another canonical
motion-planning application.
Motion planning also provides a tool for computer animation.
Given a set of object models that appear in two different scenes s1$ and
s2, a
motion planning algorithm can construct a short sequence of intermediate
motions to transform
s1 to s2.
These motions can serve to fill in the intermediate scenes between
s1 and s2, with such scene interpolation greatly
reducing the amount of work the animator has to do.
Recommended Books
Related Links
UNC's Collision Detection/Proximity Query Packages
Related Problems
This page last modified on 2008-07-10
.
www.algorist.com


 Davenport-Schinzel sequences and their geometric applications
Davenport-Schinzel sequences and their geometric applications Computational Geometry in C
Computational Geometry in C Robot Motion Planning
Robot Motion Planning The complexity of robot motion planning
The complexity of robot motion planning