1.1.6 Kd-Trees

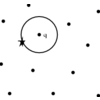
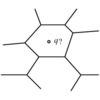
INPUT OUTPUT
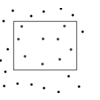
Input Description:
A set S of n points in k-dimensions.
Problem:
Construct a tree which partitions the space by half-planes
such that each point is contained in it is own region.
Excerpt from
The Algorithm Design Manual:
Although many different flavors of kd-trees have been devised, their purpose is always to hierarchically
decompose space into a relatively small number of cells such that no cell contains too many input objects. This
provides a fast way to access any input object by position. We traverse down the hierarchy until we find the cell
containing the object and then scan through the few objects in the cell to identify the right one.
Typical algorithms construct kd-trees by partitioning point sets. Each node in the tree is defined by a plane
through one of the dimensions that partitions the set of points into left/right (or up/down) sets, each with half
the points of the parent node. These children are again partitioned into equal halves, using planes through a
different dimension. Partitioning stops after lg n levels, with each point in its own leaf cell. Alternate
kd-tree construction algorithms insert points incrementally and divide the appropriate cell, although such trees
can become seriously unbalanced.
Recommended Books
Related Problems
This page last modified on 2008-07-10
.
www.algorist.com


 Data Structures and Algorithm Analysis in C++ (3rd Edition)
Data Structures and Algorithm Analysis in C++ (3rd Edition) Foundations of Multidimensional and Metric Data Structures
Foundations of Multidimensional and Metric Data Structures Data Structures, Near Neighbor Searches, and Methodology: Fifth and Sixth Dimacs Implementation Challenges
Data Structures, Near Neighbor Searches, and Methodology: Fifth and Sixth Dimacs Implementation Challenges