
Graph Based Deformable Registration
3D surface matching is a fundamental issue in computer vision with many applications such as shape registration, 3D object recognition and classification. However, surface matching with noise, occlusion and clutter is a challenging problem. Registering two frames of a deforming 3D shape relies on accurate correspondences between all points across the two frames. In the general case such correspondence search is computationally intractable. Common prior assumptions on the nature of the deformation such as nearrigidity, isometry or learning from a training set, reduce the search space but often at the price of loss of accuracy when it comes to deformations not in the prior assumptions. Conformal geometry is a powerful mathematical tool that maps 3D surfaces on appropriate 2D domains and allows for intrinsic matching of surfaces, however these matches are susceptible to noise. Instead we cast surface matching as a graph-matching problem and use those tools from Riemanian geometry to construct the appropriate metrics for a number of powerful discrete optimization solutions.
- Selected Publications:
 A Generic Deformation Model for Dense Non-Rigid Surface Registration: a Higher-Order MRF-based Approach, Yun Zeng, Chaohui Wang, David Gu, Dimitris Samaras, Nikos Paragios, In Proceedings of the IEEE International Conference on Computer Vision (ICCV) 2013, Sydney/Australia
A Generic Deformation Model for Dense Non-Rigid Surface Registration: a Higher-Order MRF-based Approach, Yun Zeng, Chaohui Wang, David Gu, Dimitris Samaras, Nikos Paragios, In Proceedings of the IEEE International Conference on Computer Vision (ICCV) 2013, Sydney/Australia- Viewpoint Invariant 3D Landmark Model Inference from Monocular 2D Images Using Higher-Order Priors, Wang, C., Zeng, Y., Loic, S., Kakadiaris, I., Samaras, D., Paragios, N., In Proceedings of the IEEE International Conference on Computer Vision (ICCV) 2011, Barcelona, Spain
- Intrinsic Dense 3D Surface Tracking, Zeng Y., Wang C., Wang Y., Gu X., Samaras D., Paragios N., In Proceedings of the IEEE International Conference on Computer Vision and Pattern Recognition (CVPR) 2011, Colorado Springs, CO.
- Dense Non-rigid Surface Registration Using High-Order Graph Matching, Zeng Y., Wang C., Wang Y., Gu X., Samaras D., Paragios N., CVPR 2010
- Ricci Flow for 3D Shape Analysis, Zeng, W., Gu, X., Samaras, D., In IEEE Transactions on Pattern Analysis and Machine Intelligence (PAMI) April 2010, vol. 32 no. 4 pp. 662-677
- Previous Publications:
- 3D Surface Matching and Recognition Using Conformal Geometry [Acknowledgments], Sen Wang, Yang Wang, Miao Jin, Xianfeng Gu, Dimitris Samaras, In Proc. of CVPR 2006.
- High Resolution Tracking of Non-Rigid 3D Motion of Densely Sampled Data Using Harmonic Maps, Yang Wang, Mohit Gupta, Song Zhang, Sen Wang, Xianfeng Gu, Dimitris Samaras, Peisen Huang, In Proc. of ICCV, pp. I: 388-395, 2005.
- Former students:
- Yun Zeng
Higher-order Surface Matching and Registration
[publications]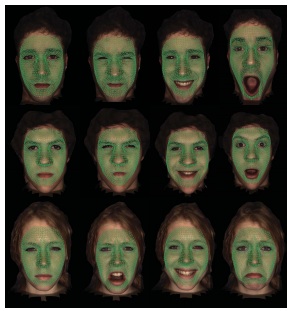
In this paper, we propose a high-order graph matching formulation to address non-rigid surface matching. The singleton terms capture the geometric and appearance similarities (e.g., curvature and texture) while the high-order terms model the intrinsic embedding energy. The novelty of this paper includes: 1) casting 3D surface registration into a graph matching problem that combines both geometric and appearance similarities and intrinsic embedding information, 2) the first implementation of high-order graph matching algorithm that solves a non-convex optimization problem, and 3) an efficient two-stage optimization approach to constrain the search space for dense surface registration. Our method is validated through a series of experiments demonstrating its accuracy and efficiency, notably in challenging cases of large and/or non-isometric deformations, or meshes that are partially occluded.
Publications
- A Generic Deformation Model for Dense Non-Rigid Surface Registration: a Higher-Order MRF-based Approach, Yun Zeng, Chaohui Wang, David Gu, Dimitris Samaras, Nikos Paragios, In Proceedings of the IEEE International Conference on Computer Vision (ICCV) 2013, Sydney/Australia
- A Generic Local Deformation Model for Shape Registration, Yun Zeng, Chaohui Wang, Yang Wang, Xianfeng Gu, Dimitris Samaras, Technical Report, INRIA, RR-7676, July, 2011.
[ BibTex ]
- Dense Non-rigid Surface Registration Using High-Order Graph Matching, Zeng Y., Wang C., Wang Y., Gu X., Samaras D., Paragios N., CVPR 2010
[ BibTex ]
Software
- Implementation of Technical Report, 2011 [ Source Code ] [ Executable (Win32) ]
Intrinsic Dense 3D Surface Tracking
[publications]This paper presents a novel intrinsic 3D surface distance and its use in a complete probabilistic tracking framework for dynamic 3D data. Registering two frames of a deforming 3D shape relies on accurate correspondences between all points across the two frames. In the general case such correspondence search is computationally intractable. Common prior assumptions on the nature of the deformation such as near-rigidity, isometry or learning from a training set, reduce the search space but often at the price of loss of accuracy when it comes to deformations not in the prior assumptions. If we consider the set of all possible 3D surface matchings defined by specifying triplets of correspondences in the uniformization domain, then we introduce a new matching cost between two 3D surfaces. The lowest feature differences across this set of matchings that cause two points to correspond, become the matching cost of that particular correspondence. We show that for surface tracking applications, the matching cost can be efficiently computed in the uniformization domain. This matching cost is then combined with regularization terms that enforce spatial and temporal motion consistencies, into a maximum a posteriori (MAP) problem which we approximate using a Markov Random Field (MRF). Compared to previous 3D surface tracking approaches that either assume isometric deformations or consistent features, our method achieves dense, accurate tracking results, which we demonstrate through a series of dense, anisometric 3D surface tracking experiments.
Publications
- A Generic Deformation Model for Dense Non-Rigid Surface Registration: a Higher-Order MRF-based Approach, Yun Zeng, Chaohui Wang, David Gu, Dimitris Samaras, Nikos Paragios, In Proceedings of the IEEE International Conference on Computer Vision (ICCV) 2013, Sydney/Australia
- Intrinsic Dense 3D Surface Tracking, Zeng Y., Wang C., Wang Y., Gu X., Samaras D., Paragios N., In Proceedings of the IEEE International Conference on Computer Vision and Pattern Recognition (CVPR) 2011, Colorado Springs, CO.
Viewpoint Invariant 3D Landmark Model Inference from Monocular 2D Images Using Higher-Order Priors
[publications]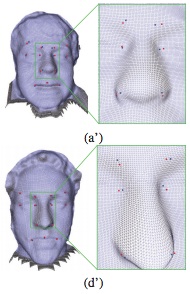
In this paper, we propose a novel one-shot optimization approach to simultaneously determine both the optimal 3D landmark model and the corresponding 2D projections without explicit estimation of the camera viewpoint, which is also able to deal with misdetections as well as partial occlusions. To this end, a 3D shape manifold is built upon fourth-order interactions of landmarks from a training set where pose-invariant statistics are obtained in this space. The 3D-2D consistency is also encoded in such high- order interactions, which eliminate the necessity of view- point estimation. Furthermore, the modeling of visibility improves further the performance of the method by handling missing correspondences and occlusions. The inference is addressed through a MAP formulation which is naturally transformed into a higher-order MRF optimization problem and is solved using a dual-decomposition-based method. Promising results on standard face benchmarks demonstrate the potential of our approach.
Publications
- Viewpoint Invariant 3D Landmark Model Inference from Monocular 2D Images Using Higher-Order Priors, Wang, C., Zeng, Y., Loic, S., Kakadiaris, I., Samaras, D., Paragios, N., In Proceedings of the IEEE International Conference on Computer Vision (ICCV) 2011, Barcelona, Spain
Ricci Flow for 3D Shape Analysis
[publications]
Ricci flow is a powerful curvature flow method, which is invariant to rigid motion, scaling, isometric, and conformal deformations. We present the first application of surface Ricci flow in computer vision. Previous methods based on conformal geometry, which only handle 3D shapes with simple topology, are subsumed by the Ricci flow-based method, which handles surfaces with arbitrary topology. We present a general framework for the computation of Ricci flow, which can design any Riemannian metric by user-defined curvature. The solution to Ricci flow is unique and robust to noise. We provide implementation details for Ricci flow on discrete surfaces of either euclidean or hyperbolic background geometry. Our Ricci flow-based method can convert all 3D problems into 2D domains and offers a general framework for 3D shape analysis. We demonstrate the applicability of this intrinsic shape representation through standard shape analysis problems, such as 3D shape matching and registration, and shape indexing. Surfaces with large nonrigid anisotropic deformations can be registered using Ricci flow with constraints of feature points and curves. We show how conformal equivalence can be used to index shapes in a 3D surface shape space with the use of Teichmuller space coordinates. Experimental results are shown on 3D face data sets with large expression deformations and on dynamic heart data.
Publications
- Ricci Flow for 3D Shape Analysis, Zeng, W., Gu, X., Samaras, D., In IEEE Transactions on Pattern Analysis and Machine Intelligence (PAMI) April 2010, vol. 32 no. 4 pp. 662-677
[ BibTex ] - Ricci Flow for 3D Shape Analysis, Xianfeng Gu, Sen Wang, Junho Kim, Yun Zeng, Yang Wang, Hong Qin, Dimitris Samaras, In ICCV 2007
[ BibTex ]
3D Surface Matching and Recognition Using Conformal Geometry
[publications & media]
3D surface matching is a fundamental issue in computer vision with many applications such as shape registration, 3D object recognition and classification. However, surface matching with noise, occlusion and clutter is a challenging problem. In this paper, we analyze a family of conformal geometric maps including harmonic maps, conformal maps and least squares conformal maps with regards to 3D surface matching. As a result, we propose a novel and computationally efficient surface matching framework by using least squares conformal maps. According to conformal geometry theory, each 3D surface with disk topology can be mapped to a 2D domain through a global optimization and the resulting map is a diffeomorphism, i.e., one-to-one and onto. This allows us to simplify the 3D surface-matching problem to a 2D image-matching problem, by comparing the resulting 2D conformal geometric maps, which are stable, insensitive to resolution changes and robust to occlusion and noise. Therefore, highly accurate and efficient 3D surface matching algorithms can be achieved by using conformal geometric maps. Finally, the performance of conformal geometric maps is evaluated and analyzed comprehensively in 3D surface matching with occlusion, noise and resolution variation. We also provide a series of experiments on real 3D face data that achieve high recognition rates.
Publications
- 3D Surface Matching and Recognition Using Conformal Geometry [Acknowledgments], Sen Wang, Yang Wang, Miao Jin, Xianfeng Gu, Dimitris Samaras, In Proc. of CVPR 2006.
Media
- 3D Face Matching Video [avi]
High Resolution Tracking of Non-Rigid 3D Motion of Densely Sampled Data Using Harmonic Maps
[publications & media]
We present a novel fully automatic method for high resolution, non-rigid dense 3D point tracking. High quality dense point clouds of non-rigid geometry moving at video speeds are acquired using a phase-shifting structured light ranging technique. To use such data for the temporal study of subtle motions such as those seen in facial expressions, an efficient non-rigid 3D motion tracking algorithm is needed to establish inter-frame correspondences. The novelty of this paper is the development of an algorithmic framework for 3D tracking that unifies tracking of intensity and geometric features, using harmonic maps with added feature correspondence constraints. While the previous uses of harmonic maps provided only global alignment, the proposed introduction of interior feature constraints guarantees that non-rigid deformations will be accurately tracked as well. The harmonic map between two topological disks is a diffeomorphism with minimal stretching energy and bounded angle distortion. The map is stable, insensitive to resolution changes and is robust to noise. Due to the strong implicit and explicit smoothness constraints imposed by the algorithm and the high-resolution data, the resulting registration/ deformation field is smooth, continuous and gives dense one-to-one inter-frame correspondences. Our method is validated through a series of experiments demonstrating its accuracy and efficiency.
Publications
- High Resolution Tracking of Non-Rigid 3D Motion of Densely Sampled Data Using Harmonic Maps, Yang Wang, Mohit Gupta, Song Zhang, Sen Wang, Xianfeng Gu, Dimitris Samaras, Peisen Huang, In Proc. of ICCV, pp. I: 388-395, 2005.
[ BibTex ]
Media
- Hi-Res Tracking Demo [avi]
Facial Expression Acquisition, Tracking and Learning
We address fundamental issues regarding the use of high quality dense 3-D data samples undergoing motions at video speeds, e.g. human facial expressions. In order to utilize such data for motion analysis and re-targeting, correspondences must be established between data in different frames of the same faces as well as between different faces. We investigate data driven approaches that consists of:
- High speed, high accuracy capture of moving faces without the use of markers
- Very precise tracking of facial motion using deformable meshes and conformal geometry
- Low dimensional mappings of dynamic facial motion that can separate expression style.
The accuracy and resolution of our method allows us to capture and track subtle expression details.
- Selected Publications:
- 3D Non-rigid Surface Matching and Registration Based on Holomorphic Differentials, Zeng, W., Zeng, Y., Wang, Y., Gu, X, Samaras, D., In Proceedings of the European Conference of Computer Vision 2008 Marseiile, France, pp. III:1-14
- Image-Driven Re-targeting and Relighting of Facial Expressions, Lei Zhang, Yang Wang, Sen Wang, Dimitris Samaras, In Computer Graphics International, pp. 11-18, 2005.
- High Resolution Acquisition, Learning and Transfer of Dynamic 3-D Facial Expressions, Yang Wang, Xiaolei Huang, Chan-Su Lee, Song Zhang, Zhiguo Li, Dimitris Samaras, Dimitris Metaxas, Ahmed Elgammal, Peisen Huang, In Computer Graphics Forum (in conjuction with EuroGraphics 2004), pp. III: 677-686, 2004.
- A Hierarchical Framework for High Resolution Facial Expression Tracking, Xiaolei Huang, Song Zhang, Yang Wang, Dimitris Metaxas, Dimitris Samaras, In Proc. 3rd IEEE Workshop on Articulated and Nonrigid Motion (in conjunction with CVPR04), p. 22.
- Media: Face Modeling and Analysis Demo [ avi ]
- Collaborators: Dimitris Metaxas, Ahmed ElGammal (Rutgers), Peisen Huang, David Gu (Stony Brook)
- Former students:
- Lei Zhang
- Sen Wang
- Yang Wang
- Funding: NSF-ITR (subcontract to Rutgers), Dept of Justice (subcontract to Notre Dame)
- Keywords: Facial Expression Analysis, Face Tracking, Dimensionality Reduction, Face Synthesis
3D Non-rigid Surface Matching and Registration Based on Holomorphic Differentials
[publications]
This paper presents a novel intrinsic 3D surface distance and its use in a complete probabilistic tracking frame- work for dynamic 3D data. Registering two frames of a de- forming 3D shape relies on accurate correspondences be- tween all points across the two frames. In the general case such correspondence search is computationally intractable. Common prior assumptions on the nature of the deformation such as near-rigidity, isometry or learning from a train- ing set, reduce the search space but often at the price of loss of accuracy when it comes to deformations not in the prior assumptions. If we consider the set of all possible 3D surface matchings defined by specifying triplets of correspondences in the uniformization domain, then we introduce a new matching cost between two 3D surfaces. The lowest feature differences across this set of matchings that cause two points to correspond, become the matching cost of that particular correspondence. We show that for surface tracking applications, the matching cost can be efficiently computed in the uniformization domain. This match- ing cost is then combined with regularization terms that enforce spatial and temporal motion consistencies, into a maximum a posteriori (MAP) problem which we approximate using a Markov Random Field (MRF). Compared to previous 3D surface tracking approaches that either assume isometric deformations or consistent features, our method achieves dense, accurate tracking results, which we demonstrate through a series of dense, anisometric 3D surface tracking experiments.
Publications
- 3D Non-rigid Surface Matching and Registration Based on Holomorphic Differentials, Zeng, W., Zeng, Y., Wang, Y., Gu, X, Samaras, D., In Proceedings of the European Conference of Computer Vision 2008 Marseiile, France, pp. III:1-14
High Resolution Acquisition, Learning and Transfer of Dynamic 3-D Facial Expressions
[publications & media]Synthesis and re-targeting of facial expressions is central to facial animation and often involves significant manual work in order to achieve realistic expressions, due to the difficulty of capturing high quality dynamic expression data. We address fundamental issues regarding the use of high quality dense 3-D data samples undergoing motions at video speeds, e.g. human facial expressions. In order to utilize such data for motion analysis and re-targeting, correspondences must be established between data in different frames of the same faces as well as between different faces. We present a data driven approach that consists of four parts:
- 1) High speed, high accuracy capture of moving faces without the use of markers
- 2) Very precise tracking of facial motion using a multi-resolution deformable mesh
- 3) A unified low dimensional mapping of dynamic facial motion that can separate expression style, and
- 4) Synthesis of novel expressions as a combination of expression styles
The accuracy and resolution of our method allows us to capture and track subtle expression details. The low dimensional representation of motion data in a unified embedding for all the subjects in the database allows for learning the most discriminating characteristics of each individual's expressions as that person's "expression style" Thus new expressions can be synthesized, either as dynamic morphing between individuals, or as expression transfer from a source face to a target face, as demonstrated in a series of experiments.
Publications
- High Resolution Acquisition, Learning and Transfer of Dynamic 3-D Facial Expressions, Yang Wang, Xiaolei Huang, Chan-Su Lee, Song Zhang, Zhiguo Li, Dimitris Samaras, Dimitris Metaxas, Ahmed Elgammal, Peisen Huang, In Computer Graphics Forum (in conjuction with EuroGraphics 2004), pp. III: 677-686, 2004.
[ BibTex ]
Media
Image-Driven Re-targeting and Relighting of Facial Expressions
[publications]
Synthesis and re-targeting of facial expressions is central to facial animation and often involves significant manual work in order to achieve realistic expressions, due to the difficulty of capturing high quality expression data. Recent progress in dynamic 3-D scanning allows very accurate acquisition of dense point clouds of facial geometry and texture moving at video speeds. Often the new facial expressions need to be rendered in different environments where the illumination is different from the original capture conditions. In this paper we examine the problem of re-targeting captured facial motion under different illumination conditions when the information we have about the face we want to animate is minimal, a single input image. Given an input image of a face, a set of illumination example images (of other faces captured under different illumination) and a facial expression motion sequence, we aim to generate novel expression sequences of the input face under the lighting conditions in the illumination example images. The input image and illumination example images can be taken under arbitrary unknown lighting. In this paper, we propose two methods in which a 3D spherical harmonic morphable model (SHBMM) can generate images under new lighting conditions with remarkable quality even if only one single image under unknown lighting is available, not only for static poses but for dynamic sequences as well where the face is undergoing subtle high-detail motion.
Publications
- Image-Driven Re-targeting and Relighting of Facial Expressions, Lei Zhang, Yang Wang, Sen Wang, Dimitris Samaras, In Computer Graphics International, pp. 11-18, 2005.
[ BibTex ]
A Hierarchical Framework For High Resolution Facial Expression Tracking
[publications]We present a novel hierarchical framework for high resolution, nonrigid facial expression tracking. The high quality dense point clouds of facial geometry moving at video speeds are acquired using a phase-shifting based structured light ranging technique. To use such data for temporal study of the subtle dynamics in expressions and for face recognition, an efficient nonrigid facial tracking algorithm is needed to establish intra-frame correspondences. In this paper, we propose such an algorithmic framework that uses a multi-resolution 3D deformable face model, and a hierarchical tracking scheme. This framework can not only track global facial motion that is caused by muscle action, but fit to subtler expression details that are generated by highly local skin deformations. Tracking of global deformations is performed efficiently on the coarse level of our face model with one thousand nodes, to recover the changes in a few intuitive parameters that control the motion of several deformable regions. In order to capture the complementary highly local deformations, we use a variational algorithm for non-rigid shape registration based on the integration of an implicit shape representation and the Free Form Deformations (FFD). Due to the strong implicit and explicit smoothness constraints imposed by the algorithm, the resulting registration/deformation field is smooth, continuous and gives dense one-to-one intra-frame correspondences. User-input sparse facial feature correspondences can also be incorporated as hard constraints in the optimization process, in order to guarantee high accuracy of the established correspondences. Extensive tracking experiments using the dynamic facial scan of five different subjects demonstrate the accuracy and efficiency of our proposed framework.
Publications
- A Hierarchical Framework for High Resolution Facial Expression Tracking, Xiaolei Huang, Song Zhang, Yang Wang, Dimitris Metaxas, Dimitris Samaras, In Proc. 3rd IEEE Workshop on Articulated and Nonrigid Motion (in conjunction with CVPR04), p. 22.
[ BibTex ]