| OT.exe |
hot keys |
the following options are supported: |
| '!' | Use Newton's method to update one step |
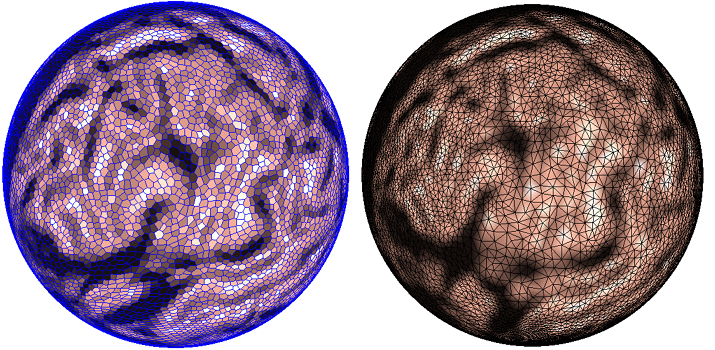
| 'd' | show convex hull or upper envelope, Delaunay triangulation or Power Diagram |
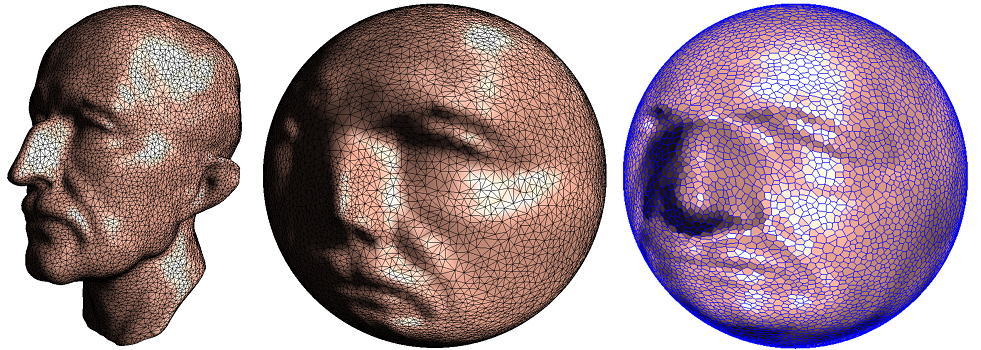
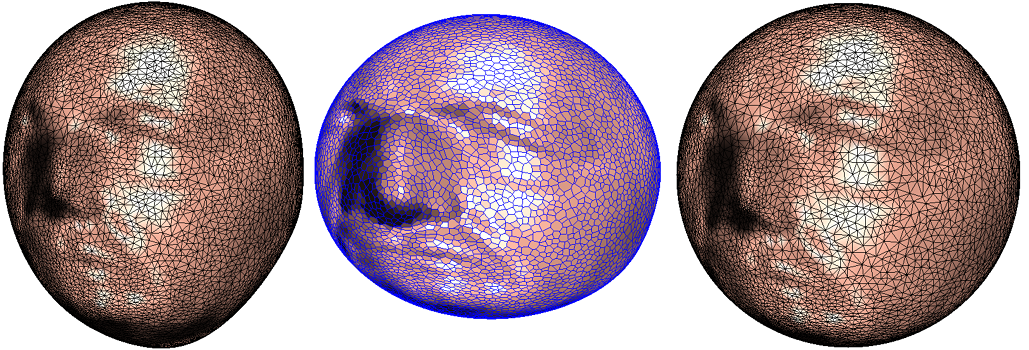
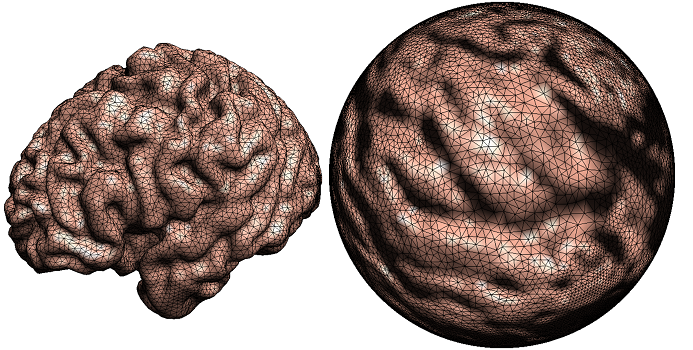
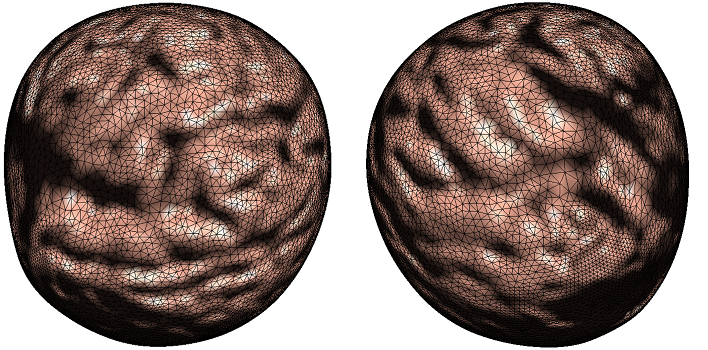
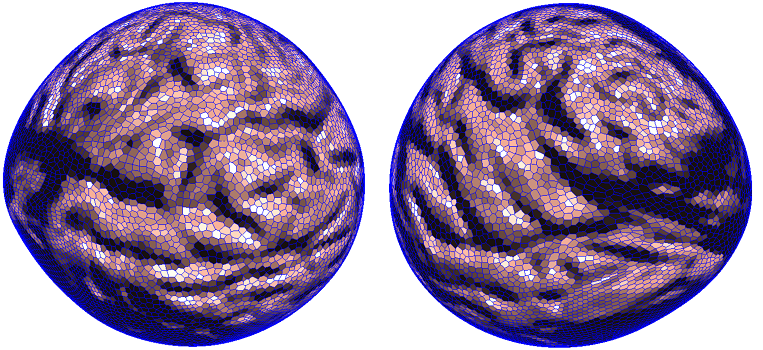
| 'g' | show 3D shape view or spherical view |
| 'l' | show power cell boundaries |
| 'c' | show power cell centers |
| 'e' | show edges |
| 'o' | take a snapshot |
| 'L' | change light source position |
| '?' | Help information |
| 'W' | output the Legendre dual mesh and the optimal transportation map mesh |
The viewer uses arcball interface, press the left mouse button and drag for rotation, press the right mouse button and drag for zoom in or out, press the middle mouse button and drag for translation.