
|
| |
|
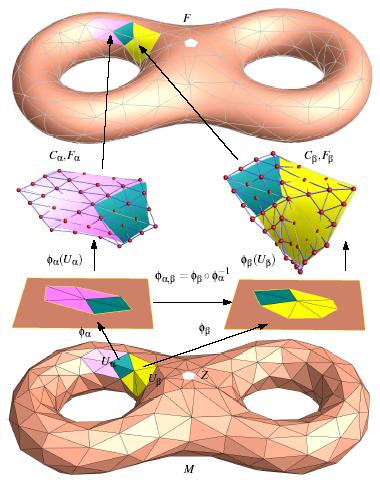
| The domain manifold is at the bottom. Two charts are shown, the spline surfaces are defined on them. The piecewise polynomial surface is on the top. The evaluation of the green region is independent of the choice of the charts. |

| (a)Holomorphic 1-form | (b) Domain manifold (Singular points marked in red) | (c) Domain manifold without singular points | (d) Manifold spline | (e) Spline overlaid with control net | (f) The singular points are filled |
Experimental Results
Knot (genus 1)

| (a) Holomorphic 1-form | (b) Domain manifold | (c) Manifold spline | (d) Control net |
Sculpture (genus 3)

|
| (a) Holomorphic 1-form | (b) Domain manifold (Singular points marked in red) | (c) Manifold spline | (d) Manifold spline (The red curves correspond to the edges in the domain manifold) | (e) Spline overlaid with the control net |
The data samples and binary codes are available for research purpose. Please email your thoughts, comments to gu AT cs DOT sunysb DOT edu.