
Visual Clutter Perception, and Proto-object Segmentation
Clutter is defined colloquially as a "confused collection" or a "crowded disorderly state". More operational definitions have also been proposed, defining clutter as "the state in which excess items, or their representation or organization, lead to a degradation of performance at some task" (Rosenholtz, Li, & Nakano, 2007). Whatever definition one chooses, visual clutter is a perception that permeates our lives in an untold number of ways. It affects our ability to find things (e.g., Neider & Zelinsky, 2011), how products are marketed and sold to us (Pieters, Wedel, & Zhang, 2007), the efficiency in which we interact with devices (Stone, Fishkin, & Bier, 1994), and even whether we find an image aesthetically pleasing or not (Michailidou, Harper, & Bechhofer, 2008). For these reasons, clutter and its consequences have been actively researched over the past decade in fields as diverse as psychology and vision science, marketing, visualization, and interface design. The goal of this study is to apply techniques from computer vision to better quantify the behavioral perception of clutter, not only to make available clutter estimates to these widely varying domains, but also to more fully understand this ubiquitous and important percept.
- Publications:
 Efficient Video Segmentation using Parametric Graph Partitioning, Chen-Ping Yu, Hieu Le, Gregory Zelinsky, and Dimitris Samaras, IEEE International Conference on Computer Vision (ICCV) 2015, Santiago/Chile
Efficient Video Segmentation using Parametric Graph Partitioning, Chen-Ping Yu, Hieu Le, Gregory Zelinsky, and Dimitris Samaras, IEEE International Conference on Computer Vision (ICCV) 2015, Santiago/Chile
- Clutter Perception Is Invariant to Image Size, Gregory Zelinsky and Chen-Ping Yu, Vision Research, May 2015
- Modeling Visual Clutter Perception using Proto-object Segmentation, Chen-Ping Yu, Dimitris Samaras, and Greg Zelinsky, Journal of Vision, June 2014
- Modeling Clutter Perception using Parametric Proto-object Partitioning, Chen-Ping Yu, Wen-Yu Hua, Dimitris Samaras, Greg Zelinsky, Neural Information Processing Systems (NIPS) 2013, Nevada/USA
- Students:
- Chen-ping Yu, Hieu Le Minh
- Dataset download: [Click here]
- More detail can be found here.
Modeling Clutter Perception using Parametric Proto-Object Partitioning
[publications]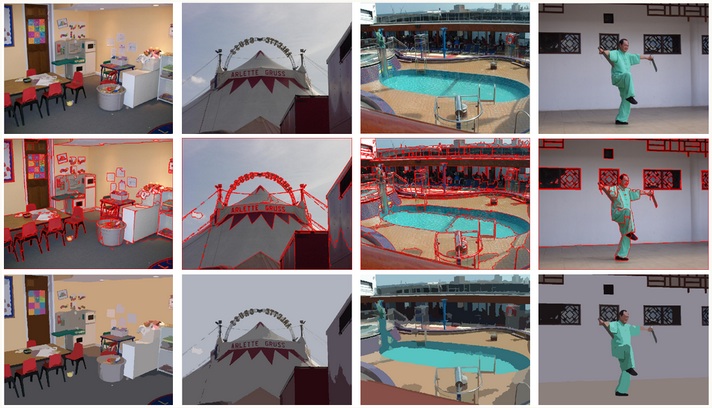
Visual clutter, the perception of an image as being crowded and disordered, affects aspects of our lives ranging from object detection to aesthetics, yet relatively little effort has been made to model this important and ubiquitous percept. Our approach models clutter as the number of proto-objects segmented from an image, with proto-objects defined as groupings of superpixels that are similar in intensity, color, and gradient orientation features. We introduce a novel parametric graph partitioning method for clustering superpixels by modeling mixture of Weibulls on Earth Mover's Distance (EMD) statistics, then taking the normalized number of proto-objects following partitioning as our estimate of clutter perception. We validated this model using a new 90-image dataset of real world scenes rank ordered by human raters for clutter, and showed that our method not only predicted clutter extremely well (Spearman's rho = 0.8038), but also outperformed all existing clutter perception models and even a behavioral obects segmentation ground truth. We conclude that the number of proto-objects in an image affects clutter perception more than the number of objects or features.
Publications
- Efficient Video Segmentation using Parametric Graph Partitioning, Chen-Ping Yu, Hieu Le, Gregory Zelinsky, and Dimitris Samaras, IEEE International Conference on Computer Vision (ICCV) 2015, Santiago/Chile
[ BibTex ]
- Clutter Perception Is Invariant to Image Size, Gregory Zelinsky and Chen-Ping Yu, Vision Research, May 2015
[ BibTex ]
- Modeling Visual Clutter Perception using Proto-object Segmentation, Chen-Ping Yu, Dimitris Samaras, and Greg Zelinsky, Journal of Vision, June 2014
[ BibTex ]
- Modeling Clutter Perception using Parametric Proto-object Partitioning, Chen-Ping Yu, Wen-Yu Hua, Dimitris Samaras, Greg Zelinsky, Neural Information Processing Systems (NIPS) 2013, Nevada/USA
[ BibTex ]